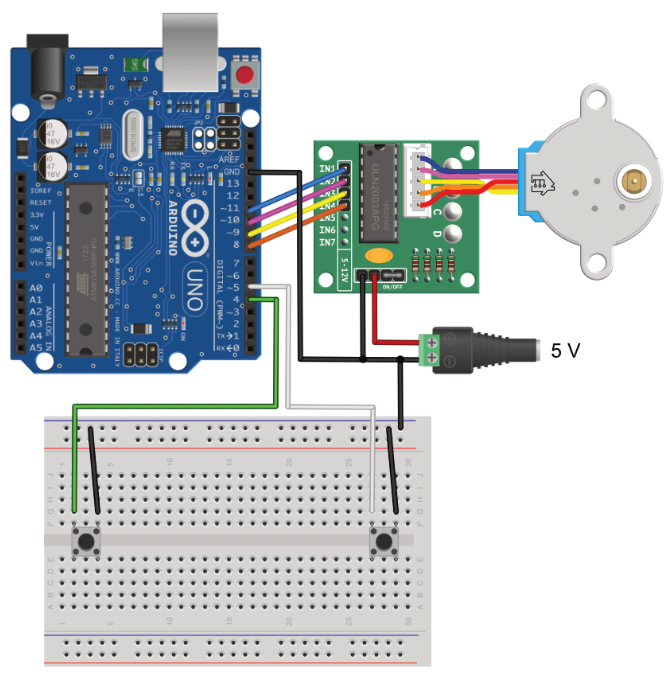
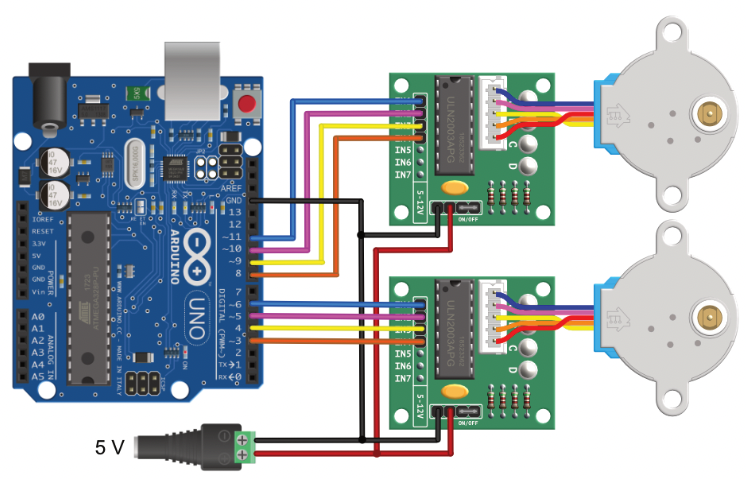
Der 28BYJ-48 Schrittmotor!








Letzte Aktualisierung am 6.05.2024 / Affiliate Links / Bilder von der Amazon Product Advertising API